

Ijraset Journal For Research in Applied Science and Engineering Technology
Comparison of Proportional Integral Derivative Control and Model Predictive Control for Commercial Vehicles
Authors: Nishad Chandrashekhar Kulkarni
DOI Link: https://doi.org/10.22214/ijraset.2024.63882
Certificate: View Certificate
Abstract
Commercial automobiles are significant in transportation, logistics, and delivery solutions. Advanced control strategies have become increasingly crucial with the increasing demand for green and environmentally responsible transportation methods. Proportional Integral Derivative Control and Model Predictive Control have emerged as promising practices for optimizing automobile performance. This paper considerably compares the Proportional Integral Derivative and Model Predictive Controller’s applications, benefits, challenges, and limitations in commercial vehicle technology. Additionally, it offers a compelling case study to illustrate the effectiveness of Model Predictive Control in real-world scenarios concerning Proportional Integral Derivative Control. Furthermore, the paper explores the future scope of Model Predictive Control, aiming to increase understanding and foster research. Ultimately, this study contributes to advancing green and sustainable vehicle generation.
Introduction
I. INTRODUCTION
Commercial vehicles have performed a critical role throughout the economic revolution, enabling the transportation of numerous items, from big and cumbersome machinery to small parcels ordered from e-commerce websites. Automating those vehicles holds full potential for enhancing performance by reducing delays triggered within the system. By minimizing human intervention, automation can mitigate errors attributable to uncertainties. Furthermore, the automation of industrial vehicles aligns with the modern-day industrial recognition of Industry 4.0. Advanced methods can be leveraged in this context, with model predictive control, Proportional Integral Derivative (PID) control, system studying, adaptive manipulation, fuzzy management, and artificial neural networks [1]. This paper mainly delves into the utility of Model predictive control (MPC) as compared to PID controller in the automation of industrial automobiles, exploring its ability benefits and implications [2].
A. Overview of Commercial Vehicle Technology
Over the years, the commercial vehicle industry has experienced advancements and new trends. Constantly changing and innovating to meet everyday use and specific customer needs since the first automobile, which appeared in 1895, the industry has also adapted to the evolving laws, regulations, and standards, prioritizing driver safety and other parameters. As the demand for efficient and reliable transportation solutions increases, the role of commercial vehicles becomes increasingly important. But now, commercial vehicle manufacturers need help with efficiency, safety, environment, sustainability, and regulatory compliance. Overcoming the challenges requires more innovative approaches, advanced technologies, and comprehensive solutions that meet the evolving needs of the industry. However, these challenges also present opportunities for innovation and advancement in vehicle design, technology integration, alternative fuels, and compliance strategies. As the industry moves forward, collaboration between manufacturers, policymakers, and other stakeholders will play a crucial role in driving the evolution of commercial vehicles toward a more efficient, safe, and sustainable future [1].
B. Motivation for Model Predictive Control
The quest to accomplish top-rated overall performance in commercial vehicle technology, ensure safety, and decrease environmental impact has intensified. The utility of MPC methods becomes paramount to fulfilling the drawbacks of PID control, such as limited adaptability, lack of accuracy, inaccurate future predictions, tuning challenges, constraint handling, and non-robust performance [3].
MPC is a promising solution, along with some advanced strategies. By leveraging its predictive abilities, MPC allows commercial vehicles to anticipate and respond to future situations, facilitating proactive decision-making and managing moves [3]. The power of MPC to deal with operational constraints makes it especially appropriate for commercial vehicles, wherein elements consisting of speed limits, torque boundaries, and protection considerations play a vital position. Moreover, MPC’s optimization skills empower commercial vehicles to concurrently optimize a couple of performance targets, along with fuel performance, emissions reduction, and stability [1]. Furthermore, MPC’s adaptability to changing running conditions and dynamics ensures robust control in numerous environments. The successful adoption of MPC in the vehicle enterprise has proven its capacity to revolutionize the industrial automobile era, imparting stepped-forward performance, more desirable safety functions, and optimized power control [3]. Therefore, investigating using MPC in the context of industrial motors is the most effective, well-timed, and vital to unlocking its full ability and addressing the multifaceted challenges faced by operating the industry.
II. FUNDAMENTALS OF PROPORTIONAL INTEGRAL DERIVATIVE
PID control is a fundamental and widely used management method in various business packages. It operates on three essential additives: proportional (P), integrator (I), and derivative (D) phrases. The proportional term provides a control signal directly proportional to the error between the desired setpoint and the measured process variable. The integrator keeps integrating the correction over time, compensating for typical mistakes, and ensuring accurate setpoint tracking. The derivative term considers the changing error rate, allowing for anticipatory control and damping of oscillations. The PID controller can adjust the device and maintain stability by appropriately tuning it.
It is a simple yet effective management strategy that has discovered applications in numerous industries, including production, robotics, and automation. PID control balances stability, responsiveness, and consistent accuracy, making it a versatile and widely adopted control technique. [2]
III. LIMITATIONS OF PROPORTIONAL INTEGRAL DERIVATIVE
Despite its massive use, PID manipulation has drawbacks that limit its applicability in some scenarios. One main downside is PID controllers’ restricted adaptability to address non-linear and time-varying structures. They are designed based on linear assumptions and struggle to offer the best control performance while machine dynamics change dramatically. Tuning PID controllers can be difficult, requiring professional guidance and adjustment of controller parameters [2]. Achieving the finest performance becomes time-consuming and often depends on trial and error [2]. PID controllers cannot predict future device behavior, relying only on current mistakes.
This results in suboptimal control and slow responses to adjustments inside the machine. Moreover, PID controllers can exhibit overshot and oscillatory conduct, especially in systems with excessive gain or strong nonlinearities [2]. This instability can lead to decreased control accuracy and increased wear on mechanical instruments. Additionally, PID manipulation is limited in addressing constraints, making it challenging to manipulate control alerts or device states inside unique bounds. In summary, despite PID management being a well setup technique, its drawbacks in handling nonlinearities, tuning complexity, lack of predictive abilities, and constraints governing can restrict its performance in some manipulated applications.
IV. FUNDAMENTALS OF MODEL PREDICTIVE CONTROL
In MPC, the essential factor lies in the accurate computation of gadget output predictions through a dedicated model. The choice of model and understanding of system dynamics is pivotal in accomplishing precise predictions. Whether using linear or nonlinear models, the accuracy of the projections may be similarly improved by incorporating various factors, which include disturbance models, noise, and uncertainty estimations [3].
Regular assessment and updates of the version are vital to upholding its accuracy, specifically in dynamic systems where modifications in running situations or system parameters can occur. Alongside correct predictions, the computational efficiency of the model is similarly essential in MPC implementation. Real-time control decisions rely on well-timed forecasts inside limited computational resources [1].
To deal with these problems, efficient model formulations and optimization algorithms are employed, making specific practical control actions based on the expected outputs. Fig. 1 explains the real-time working of the MPC block, considering disturbances, reference inputs, and optimizing the function to predict the future states and feed it to the control plant [3].
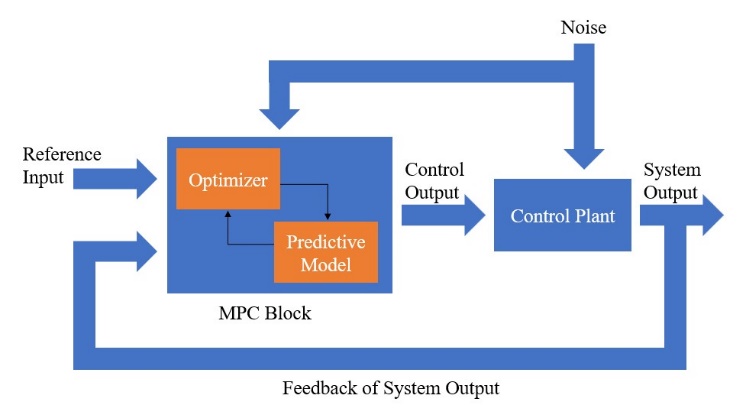
Fig. 1 Block diagram of Model Predictive Control
A. Principles and Concepts
MPC encompasses three fundamental stages: prediction, optimization, and receding horizon implementation [4]. The system’s behavior is predicted using the system model over a prediction horizon in the prediction phase. This permits anticipation of future system responses. The optimization segment involves optimizing the system conduct based on a cost function while adhering to specified constraints.
Optimizing control inputs can be determined by formulating and fixing an optimization problem. Finally, the receding horizon implementation consists of implementing only the first step of the optimized control input and discarding the remaining steps. This method is repeated iteratively at each time step, allowing the prediction and optimization to be constantly updated. These three phases work in tandem to expect the following stage and optimize control actions accordingly [4]. However, the choice of the prediction horizon needs to be regularly understood or oversimplified as a tuning parameter. The prediction horizon should be cautiously chosen to strike a balance. Selecting an overly lengthy prediction horizon can cause pointless computational burden and inefficiency, at the same time, as an excessively short horizon may additionally bring about inadequate predictions [3]. Thus, optimal selection of the prediction horizon is crucial for efficient and powerful MPC performance, ensuring accurate predictions without needless computational overhead.
B. Formulation and Optimization
By formulating the manipulation problem as an optimization challenge, MPC permits predicting future vehicle states, facilitating the anticipation of adjustments in operating conditions and the generation of optimal control actions accordingly. As shown in
Fig. 2, at every step, the system’s current state, denoted as x(k) is measured. An optimization problem is solved using the prediction model to decide the optimal control input sequence U*(k) .
This optimal input sequence represents the control actions to steer the system toward the favored state while considering constraints and performance objectives. Once the most desirable enter series is acquired, MPC implements only the first element of the sequence as the actual control input sequence u*k=I 0…0 U*(k) . This implementation is accompanied by an incrementation of the time instantaneous k :=k+1 , putting, and moving on to the subsequent iteration. By repeatedly performing those steps, MPC ensures that the control moves are constantly updated primarily based on the most current measurements and predictions, allowing for actual-time adaptation and response to dynamic device behavior. This iterative technique of state measurement, optimization, and implementation characterizes MPC’s essence, permitting unique manipulation and adaptive selection-making in an extensive range of applications, such as vehicle technology. [4]
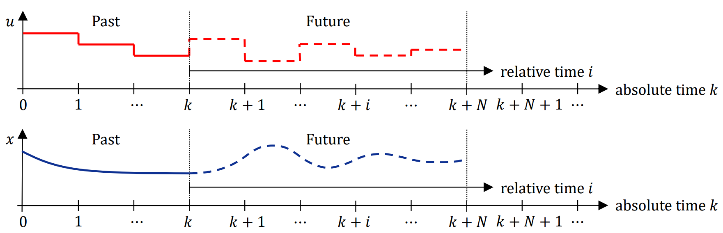
Fig. 2 Concept of Model Predictive Control [4]
C. Constraints Handling
In practice, most MPC algorithms predominantly use linear models because of their advantages in ease of optimization and rancid-line evaluation of anticipated closed-loop behavior. By utilizing linear approaches, the dependence of predictions on future control alternatives becomes linear, simplifying the optimization process and facilitating analysis. Linear models are specifically beneficial when computational efficiency is critical [3]. However, there are conditions where linear approximations may not appropriately capture the gadget’s dynamics, necessitating non-linear approaches. In cases where the computational burden isn’t always a constraint issue, and linear approximations fall short, non-linear models can provide a more realistic representation of the object’s conduct and potentially enhance control performance. Using linear or non-linear models in MPC hinges on the device’s complexity, non-linear dynamics or stable couplings between variables, and the number of computation sources [3]. Evaluating the trade-off between accuracy and the computational burden is paramount in determining the most suitable model preference for robust control design and optimization.
V. APPLICATIONS OF MODEL PREDICTIVE CONTROL IN COMMERCIAL VEHICLE
The utility of MPC has garnered considerable attention throughout diverse industries because of its capability to optimize the performance of complex structures compared to PID control. Different applications demonstrate the versatility and effectiveness of MPC in optimizing industrial vehicles across various industries. The following are some of the widely used examples in the industry for commercial vehicles.
A. Energy Management Systems
In commercial transportation, effective energy management plays an important position. MPC offers significant benefits in this area. By incorporating MPC into energy control systems, industrial vehicles can ensure the most advantageous allocation and utilization of power resources, including internal combustion engines, electric motors, and batteries. MPC integration allows precise battery charging optimization, as highlighted in reference [5]. This ensures green power usage and extends battery lifetimes. Furthermore, hybrid business cars can benefit from MPC by allowing the optimal engine and electric motor coordination, which reduces carbon emissions, as cited in reference [6]. MPC’s predictive nature permits waiting for future driving situations and dynamically adjusting energy assets to decrease environmental effects. Moreover, MPC may be implemented to optimize fuel cell performance and is increasingly used in electric-powered commercial automobiles. By leveraging MPC’s predictive competencies, fuel cells may be operated in real-time to maximize their efficiency and average lifetime, as indicated in reference [6]. In summary, the integration of MPC in electricity control for commercial cars gives various advantages, including optimized battery charging, decreased carbon emissions in hybrid automobiles, and advanced overall performance and toughness of fuel cells. These abilities contribute to more sustainable and green operations, fostering more energy-efficient vehicles.
B. Vehicle Dynamics and Stability Control
MPC plays a vital role in ensuring safe and stable operation within the realm of car dynamics and stability manipulation for industrial cars. MPC’s predictive talents allow for real-time amendment of car parameters, including steering, braking, and torque distribution, to enhance maneuverability, reduce rollover risk, and enhance average safety [7]. This is mainly relevant for industrial automobiles with excessive mass and being subjected to cornering forces at extreme speeds.
MPC can counteract instability and prevent rollovers. Additionally, MPC can optimize air brake performance by constantly monitoring car dynamics, including speed, weight distribution, and road conditions, leading to stepped-forward braking performance and shorter braking distances, as referred to in [7]. MPC’s effectiveness in preventing rollovers and optimizing stability has been validated [8]. Overall, MPC’s predictive abilities greatly value industrial automobile dynamics and stability control. This contributes to more secure and reliable street operations.
C. Adaptive Cruise Control
MPC has received extensive attention in cruise control systems for industrial vehicles. Its ability to account for different factors, such as visitors’ situations, avenue characteristics, and vehicle dynamics, makes it a valuable tool for generating manipulation moves that are adaptive to the visitors’ conditions. The implementation of MPC in adaptive cruise control (ACC) structures has proven promising results in minimizing time loss and improving typical performance, as evidenced by [9]. Additionally, MPC may be utilized to optimize cruise control under energy constraints, decreasing energy loss within the machine. This is highlighted in [10]. By harnessing the potential of MPC, industrial automobiles can achieve stepped-forward performance, improved safety, and increased fuel efficiency in cruise control operations [10]. This demonstrates the importance of MPC in revolutionizing cruise control implementation and optimization for industrial motors. MPC’s ability to dynamically adapt and manipulate movements based on real-time information and predictive models makes it a treasured device for optimizing cruise control in commercial vehicles. By thinking about traffic, avenue situations, and electricity constraints, MPC enables creative and efficient management, improving overall performance and sustainability.
VI. BENEFITS OF MODEL PREDICTIVE CONTROL IN COMMERCIAL VEHICLE
Overall, the combination of MPC in commercial vehicle generation holds the capacity to revolutionize the industry using enhancing vehicle performance, protection, and environmental effects. MPC gives numerous essential blessings inside the context of commercial vehicles. Some of them are explained below.
A. Fuel Efficiency and Emissions Reduction
One of the many benefits of Model Predictive Control MPC in industrial automobile generation is its remarkable impact on gas efficiency and emissions discount. By optimizing control moves based on current vehicle and environmental conditions, MPC can reduce fuel consumption and obtain the lowest possible emissions range. This is achieved through smart control of powertrain components, optimizing engine operation, and leveraging technologies like hybridization or electrification [11]. MPC considers factors such as vehicle velocity, load, street conditions, and traffic patterns to make informed decisions prioritizing fuel efficiency and emissions reduction [11]. MPC guarantees that the car operates at its ultimate performance level while minimizing gas consumption and emissions. A significant reduction in emissions can be found when predictive controls are used alongside powertrain optimization techniques [12]. The predictive nature of MPC enables proactive adjustments that predict upcoming riding situations, resulting in smoother and more green operations. Overall, MPC in industrial motors holds the potential for substantially enhancing fuel overall performance and reducing emissions. This contributes to a greener and more sustainable transportation enterprise.
B. Enhanced Safety and Stability
Enhanced safety and balance are key advantages of implementing MPC in the business automobile era. MPC allows real-time tracking and management of numerous automobile parameters, including steering, braking, and torque distribution, to enhance maneuverability and safety [13]. By continuously predicting and optimizing managed movements based on dynamic situations, MPC can save you from rollovers and mitigate the dangers associated with high loads and cornering forces during automobile operations. Additionally, MPC can enhance safety systems’ overall performance, including air brakes, ensuring a brief and powerful response in critical situations. The predictive nature of MPC is conducive to proactive changes that consider the situation on the street, the presence of visitors, and automobile dynamics, resulting in greater stability and coincidence prevention [14]. By using MPC, industrial vehicles can obtain better protection, lowering the probability of injuries and minimizing the risk of injuries or damage. This era plays an important role in enhancing business vehicle operations’ overall safety and balance [14]. This contributes to more closed roads and improved transportation industry requirements.
C. Improved Traffic Flow and Routing
MPC is important in optimizing site visitors’ glide and routing for industrial cars, providing substantial benefits. By considering current traffic conditions, street networks, and car dynamics, MPC algorithms can generate and manage actions that optimize industrial motor motion through congested areas. This consists of dynamically adjusting speed, lane selection, and path selection to minimize delays, reduce congestion, and improve traffic efficiency [15]. Moreover, MPC can facilitate effective coordination among autonomous vehicles at intersection points. This allows them to talk and prioritize their movements to prevent injuries and ensure clean site visitors comply with the flow. This is mentioned in [15]. By integrating an independent sensing device within commercial cars, obligations can be performed based solely on sophisticated algorithms to maximize rewards and attain predetermined goals [16]. This enables the cars to autonomously navigate and execute their assigned obligations while adhering to planned techniques. This contributes to efficient and goal-oriented commercial car operations.
VII. CHALLENGES AND LIMITATIONS OF MODEL PREDICTIVE CONTROL IN COMMERCIAL VEHICLE
Despite the several benefits and ability programs of MPC in industrial vehicle technology, numerous challenges and limitations exist that want to be addressed. These elements can affect MPC systems’ feasibility, implementation, and overall performance in actual-world situations.
A. Computational Complexity
The computational complexity of MPC fashions is regularly exacerbated with the aid of the want to address unsure or various operating conditions, mainly to expand computation time and practical resource usage. Researchers have dedicated sizable efforts to deal with this mission and enhance the computational efficiency of MPC algorithms [17]. Techniques with version reduction, parallel computing, and algorithmic optimizations have been explored to alleviate the computational burden and beautify overall real-time performance, these advancements, discussed in detail in [17], have contributed to minimizing the computational overhead while maintaining MPC’s effectiveness for complicated structures. The paper additionally presents insights into the alternate-offs between computational complexity and control overall performance, highlighting the importance of putting stability between computational necessities and favored management objectives.
B. Real-Time Implementation
Furthermore, the real-time implementation of MPC structures in realistic programs necessitates addressing other demanding situations past verbal exchange reliability and pace. One key issue is the attention to hardware constraints and obstacles within the control unit and actuators. Choosing and integrating appropriate sensors, actuators, and embedded structures are important in accomplishing efficient and robust real-time management [18]. Additionally, the synchronization and coordination of multiple control loops, including those managing special subsystems or interacting automobiles in a networked environment, introduce complexities that ought to be carefully controlled [18]. The paper [18] dives deeper into these components, discussing modern processes that make real-time optimization feasible, including PIL simulations. These superior strategies ensure MPC’s seamless integration and reliable operation in numerous real-world eventualities.
C. Model Accuracy and Uncertainty
Developing novel predictive MPC frameworks has addressed the assignment of accuracy and uncertainty in model-primarily based control. These frameworks incorporate strong optimization and adaptive modeling strategies to explicitly account for uncertainties in machine dynamics, sensor measurements, and environmental conditions [19]. By thinking about worst-case eventualities and optimizing the management movements, those frameworks beautify the robustness and reliability of the MPC device. The paper [19] delves into the information of such predictive MPC frameworks, highlighting their capability to improve the accuracy of predictive fashions while preserving computational efficiency. Furthermore, the paper [20] offers a comprehensive analysis of the machine’s recognition and deals with uncertainties, demonstrating its effectiveness in optimizing the plant’s performance under diverse, challenging conditions.
VIII. CASE STUDY
The case study section of this research paper gives practical applications and actual-world examples to illustrate the effectiveness of the proposed model predictive manipulation technique advantageous when compared to PID. Through this case research, we aim to showcase MPC’s performance, performance, and applicability in diverse scenarios and domain names. By examining particular use instances and their results, we provide empirical evidence of the blessings and insights received from implementing MPC in numerous systems.
A. MPC in Electric Commercial Vehicles
A case study in MPC in commercial electric automobiles focuses on the software of MPC strategies, mainly within the context of electrical vehicles used for business functions. This case study explores how MPC can be applied to optimize electrical business cars’ overall performance and efficiency, addressing challenges that include range optimization, strength control, and automobile dynamics manipulation compared to PID [21]. By thinking about the complex interactions between the electric drivetrain, battery machine, and numerous subsystems, MPC offers the capacity to dynamically adjust car working parameters and manage moves in real time [21]. The case observation presents situations and simulations where MPC algorithms are hired to maximize strength efficiency, reduce charging time, and beautify basic car performance in electric business cars [21]. It highlights the advantages of MPC in attaining specific control over vehicle operation, ensuring optimum utilization of the electric powertrain, and ultimately contributing to the advancement and adoption of electrical industrial vehicle technology.
B. MPC in Heavy-Duty Trucks
A case study in MPC in heavy-responsibility vans makes a specialty of the software of MPC techniques particularly tailored to the specific traits and requirements of heavy-responsibility trucking operations. This case delves into the usage of MPC for optimizing various components of heavy-responsibility truck performance, including fuel efficiency, emissions discount, and car balance [22]. As compared to PID, MPC algorithms are applied to leverage advanced vehicle models and actual-time sensor information to make predictive manipulation selections for the truck’s powertrain, braking gadget, and different subsystems more efficient [22]. By considering factors of road grade, traffic situations, and load traits, MPC permits proactive control moves to maximize the gasoline financial system, secure operations, and limit wear and tear on car additives. The case looks at real-global situations and simulation results demonstrating the benefits of MPC in heavy-obligation vans, showcasing how it may notably enhance operational efficiency and environmental sustainability in this essential transportation region. MPC is applied to platooning in trucking programs [23]. It allows vans to travel together coordinated, enhancing gasoline efficiency, and reducing congestion [23]. By optimizing manipulated movements, MPC guarantees safe and efficient operations in the platoon, resulting in an extended gas financial system and reduced emissions. This era offers a promising solution to boosting business trucking performance.
C. MPC in Autonomous Delivery Systems
A case in autonomous shipping systems explores the application of advanced manipulation strategies, including MPC, inside the context of independent transport vehicles. This case focuses on growing efficient and dependable self-sustaining systems for closing-mile shipping, in which motors navigate city environments to transport items and packages. In contrast to PID, MPC performs a vital function in optimizing autonomous vehicle trajectory planning and management, thinking about traffic situations, pedestrian interactions, and transport time limits [24]. By leveraging sensor statistics, predictive fashions, and optimization algorithms, MPC permits self-sufficient motors to make knowledgeable decisions in actual time, ensuring safe and efficient shipping operations [24]. The case examination offers situations in which MPC addresses dynamic limitations, adapts to converting site visitors’ conditions, and optimizes automobile paths for minimum tour time and energy consumption [24]. Through this situation look at, the blessings of MPC in improving the performance and reliability of independent shipping structures are verified, paving the manner for the sizable adoption of autonomous technologies within the logistics and e-commerce industries.
IX. FUTURE SCOPE
This section of the paper aims to identify potential areas for research and development based on the study’s findings, challenges, and limitations. It highlights possibilities for further research and provides an avenue for future investigations. In this section, we explore the potential implications of the research and highlight a roadmap for further development in this field. Some of the important topics for future study are elaborated below.
A. Integration with Connected and Cooperative Systems
As technology advances, the interconnection of diverse systems presents vast opportunities for advanced overall performance. By seamlessly integrating the studied machine with other connected systems, we free up the potential for joint operations, record sharing, resource allocation, and resource optimization [25]. This integration creates new avenues for research, allowing the development of revolutionary techniques that leverage the collective intelligence and competencies of more than one interconnected structure [25]. These techniques address complex challenges and achieve synergistic outcomes. By leveraging the energy of interlinked networks, we can beautify procedures, optimize aid allocation, and enhance standard device performance [25].
For example, strength technology, distribution, and intake systems permit continuous monitoring, call response, and green electricity management within intelligent grids. Similarly, mixing vehicles, infrastructure, and traffic management structures in transportation systems allows for intelligent site visitor control, dynamic routing, and stepped-forward congestion management [25]. The possibilities are immense, and by harnessing the power of interconnected structures, we will drive innovation, beautify performance, and pave the way for an increasingly integrated and intelligent destination.
B. Hybrid and Multi-objective approaches
Exploring hybrid and multi-goal approaches is a component of the future scope. Traditional PID and single-objective MPC techniques can also fall short when achieving the best solutions as industries face complex and conflicting targets. We will effectively cope with trade-offs and uncertainties by incorporating hybrid strategies and embracing multi-goal optimization principles. The study enables choice-making methods that allow for the stability of several desires simultaneously, considering device dynamics and constraints [26]. Hybrid and multi-goal strategies offer complete and reliable selection-making capabilities. They remember a few performance standards holistically, along with efficiency, stability, reliability, and environmental impact [26]. By capturing the interdependencies and interactions among targets, those approaches generate the most appropriate answers without compromising one objective for another. Furthermore, hybrid MPC and PID methods leverage innovative strategies or models, improving operational flexibility in dynamic and ambiguous environments. Embracing hybrid and multi-objective approaches allows powerful performance alternate-off management and high operational flexibility and fosters sustainable and resilient structures [26]. This area of research holds promise for superior manipulation techniques for future industrial applications.
C. Machine Learning and Data-driven Approach
In the future scope of this study, an exciting avenue to explore includes integrating Machine Learning (ML) and Data-Driven strategies. ML techniques have shown a remarkable ability to analyze large amounts of statistics and extract valuable insights [27]. By incorporating ML algorithms into MPC and PID frameworks, we can enhance the predictive skills of manipulative structures and allow adaptive decision-making in dynamic environments [27]. Data-driven MPC uses historical and current measurements to improve accuracy and make informed manipulation decisions. Integrating ML and a Data-Driven approach opens opportunities for advanced control techniques that autonomously adapt to evolving system dynamics, examine past reports, and optimize performance in real-time [27]. This fusion of ML and Data-Driven holds great promise for optimizing complex structures, improving energy efficiency, and permitting self-sufficient management in numerous domains. By leveraging ML’s capability to analyze and learn from records, blended with predictive capabilities, we can develop intelligent control systems that continuously adapt and maximize their performance [27]. This integration paves the way for various products’ extra green and powerful control strategies.
X. DISCUSSION
The paper discusses PID and MP controllers in the industrial automobile era and presents insights into their advantages, challenges, and future guidelines. The findings demonstrate that MPC offers extensive benefits in enhancing vehicle performance, fuel performance, emissions reduction, and typical safety. It stands out for its potential to handle nonlinear dynamics and constraints effectively. However, the challenges of computational complexity and model accuracy must be addressed for wider adoption. The capability effect of MPC in the industry is substantial. However, further studies and development are essential to refine optimization algorithms, improve model identity strategies, and ensure compatibility with present systems. Regulatory elements and standardization efforts are also vital for successful implementation. Overall, this assessment highlights the promising capability of MPC compared to PID in commercial vehicle generation and emphasizes the want for endured research and collaboration to power its adoption and maximize its advantages.
In practical terms, cautious attention to cost, scalability, and compatibility with existing systems is essential. Cost-effectiveness and scalability ought to be justified by the achieved advantages, and efforts must be made to expand scalable solutions appropriate for numerous car types and fleet sizes. Compatibility with existing car systems and demanding integration situations must be addressed while retrofitting MPC into older cars. Collaboration among enterprise stakeholders, researchers, and regulatory bodies is critical to establish recommendations, standards, and frameworks that ensure interoperability, protection, and reliability throughout distinctive producers and systems. MPC can pave the way for transformative advancements in industrial automobile technology by addressing these practical implications and fostering a collaborative method.
Conclusion
In conclusion, this comprehensive study proves that MPC is more effective than PID controllers in commercial vehicle technology. It has wide applications in every system in the automobile. Implementing a variety of MPC systems can save resources and minimize operational costs. It can also improve vehicle safety and reduce emissions. Other than the key benefits mentioned, employing MPC techniques has several other significant advantages. As an emerging technology, research and development in this field can reduce the challenges currently faced in developing any MPC system. Also, more software that supports a built-in MPC block should be made available to the complexity of the user. Compared to other evolving technologies, MPC sounds more promising and reliable since it uses a mathematical model that uses feedback. More and more applications should be developed, from prototypes to actual vehicles. MPC is a viable option for commercial vehicle optimization. As a result, it can be implemented in commercial vehicles as a practical and beneficial technology. This technology can potentially revolutionize the automotive industry by providing a safe, economical, and environmentally friendly solution.
References
[1] J. A. Rossiter, A First Course in Predictive Control, Second Edition. Boca Raton, Florida: CRC Press, 2018. [2] Vagia, M. (2012) PID controller design approaches: Theory, tuning and application to Frontier Areas. Rijeka, Croatia: InTech. [3] E. F. Camacho, Model Predictive Control. New York, USA: Springer, 2007. [4] Görges D., Lecture Notes, Chapter 1. Introduction to Model Predictive Control, WS 2022. [Online]. https://olat.vcrp.de/url/RepositoryEntry/3888808629 Available: [5] F. Zhou, Y. Li, W. Wang, and C. Pan, “Integrated Energy Management of a smart community with electric vehicle charging using scenario based stochastic model predictive control,” Energy and Buildings, vol. 260, p. 111916, 2022. doi:10.1016/j.enbuild.2022.111916 [6] A. Ferrara, M. Okoli, S. Jakubek, and C. Hametner, “Energy Management of heavy-duty fuel cell electric vehicles: Model predictive control for fuel consumption and lifetime optimization,” IFAC PapersOnLine, vol. 53, no. 2, pp. 14205–14210, 2020. doi:10.1016/j.ifacol.2020.12.1053 [7] D. Hu, G. Li, and F. Deng, “Gain-scheduled model predictive control for a commercial vehicle air brake system,” Processes, vol. 9, no. 5, p. 899, 2021. doi:10.3390/pr9050899 [8] C. Zhou, L. Yu, Y. Li, Z. Lu, and J. Song, “A layered roll stability control strategy for commercial vehicles based on Adaptive Model Predictive Control,” Vehicle System Dynamics, pp. 1–22, 2022. doi:10.1080/00423114.2022.2154229 [9] G. J. L. Naus, J. Ploeg, M. J. G. Van de Molengraft, W. P. M. H. Heemels, and M. Steinbuch, “Design and implementation of parameterized adaptive cruise control: An explicit model predictive control approach,” Control Engineering Practice, vol. 18, no. 8, pp. 882–892, 2010. doi:10.1016/j.conengprac.2010.03.012 [10] A. Weißmann, D. Görges, and X. Lin, “Energy-optimal adaptive cruise control combining model predictive control and dynamic programming,” Control Engineering Practice, vol. 72, pp. 125–137, 2018. doi:10.1016/j.conengprac.2017.12.001 [11] T. L. McKinley and A. G. Alleyne, “Adaptive model predictive control of an SCR catalytic converter system for Automotive Applications,” IEEE Transactions on Control Systems Technology, vol. 20, no. 6, pp. 1533–1547, 2012. doi:10.1109/tcst.2011.2169494 [12] A. Petrillo, M. V. Prati, S. Santini, and F. Tufano, “Improving the nox reduction performance of an euro VI D SCR system in real-world condition via nonlinear model predictive control,” International Journal of Engine Research, vol. 24, no. 3, pp. 823–842, 2021. doi:10.1177/14680874211066217 [13] G. Schildbach, M. Soppert, and F. Borrelli, “A collision avoidance system at intersections using robust model predictive control,” 2016 IEEE Intelligent Vehicles doi:10.1109/ivs.2016.7535391 Symposium (IV), 2016. [14] S. G. Dehkordi, G. S. Larue, M. E. Cholette, A. Rakotonirainy, and H. A. Rakha, “Ecological and safe driving: A model predictive control approach considering spatial and temporal constraints,” Transportation Research Part D: Transport and Environment, vol. 67, pp. 208–222, 2019. doi:10.1016/j.trd.2018.11.010 [15] L. Makarem and D. Gillet, “Model predictive coordination of autonomous vehicles crossing intersections,” 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013), 2013. doi:10.1109/itsc.2013.6728489 [16] S. Yu, M. Hirche, Y. Huang, H. Chen, and F. Allgöwer, “Model Predictive Control for Autonomous Ground Vehicles: A Review,” Autonomous Intelligent Systems, vol. 1, no. 1, 2021. doi:10.1007/s43684-021-00005-z [17] S. Richter, M. Morari, Y. Nesterov, M. Morari, and M. Morari, Computational Complexity Certification of Gradient Methods for Real-Time Model Predictive Control. Zu?rich: ETH, 2012. [18] L. G. Bleris and M. V. Kothare, “Real-time implementation of Model predictive control,” Proceedings of the 2005, American Control Conference, 2005., pp. doi:10.1109/acc.2005.1470631 4166–4171, Jun. 2005. [19] K. Pereida and A. P. Schoellig, “Adaptive model predictive control for high-accuracy trajectory tracking in changing conditions,” 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018. doi:10.1109/iros.2018.8594267 [20] P. J. Campo and M. Morari, “Robust Model Predictive Control,” 1987 American Control Conference, Minneapolis, MN, USA, 1987, pp. 1021-1026, doi:10.23919/ACC.1987.4789462. [21] A. Di Giorgio, F. Liberati, and S. Canale, “Electric vehicles charging control in a smart grid: A model predictive control approach,” Control Engineering Practice, vol. 22, doi:10.1016/j.conengprac.2013.10.005 pp. 147–162, 2014. [22] B. Groelke et al., “A comparative assessment of economic model predictive control strategies for fuel economy optimization of heavy-duty trucks,” 2018 Annual American Control Conference (ACC), 2018. doi:10.23919/acc.2018.8431050 [23] C. Earnhardt, B. Groelke, J. Borek, and C. Vermillion, “Hierarchical model predictive control approaches for strategic platoon engagement of heavy-duty trucks,” IEEE Transactions on Intelligent Transportation Systems, vol. 23, no. 7, pp. 8234–8246, 2022. doi:10.1109/tits.2021.3076963 [24] Y. Shi and K. Zhang, “Advanced model predictive control framework for Autonomous Intelligent Mechatronic Systems: A tutorial overview and Perspectives,” Annual Reviews in Control, vol. 52, pp. 170–196, 2021. doi:10.1016/j.arcontrol.2021.10.008 [25] S. Jing, F. Hui, X. Zhao, J. Rios-Torres, and A. J. Khattak, “Integrated longitudinal and lateral hierarchical control of cooperative merging of connected and automated vehicles at on-ramps,” IEEE Transactions on Intelligent Transportation Systems, vol. 23, no. 12, pp. 24248–24262, 2022. doi:10.1109/tits.2022.3204033 [26] H. Bederina and M. Hifi, “A hybrid multi-objective evolutionary optimization approach for the robust vehicle routing problem,” Applied Soft Computing, vol. doi:10.1016/j.asoc.2018.07.014 71, pp. 980–993, 2018. [27] D. Piga, M. Forgione, S. Formentin, and A. Bemporad, “Performance oriented model learning for data-driven MPC Design,” IEEE Control Systems Letters, vol. 3, doi:10.1109/lcsys.2019.2913347 S. M. Metev and V. P. Veiko, Laser Assisted Microtechnology, 2nd ed., R. M. Osgood, Jr., Ed. Berlin, Germany: Springer-Verlag, 1998.
Copyright
Copyright © 2024 Nishad Chandrashekhar Kulkarni. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET63882
Publish Date : 2024-08-05
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online